
本文主要讲解Autosar CAN 协议栈原理、集成及相关调试策略
CAN通信基本原理
CAN通信概述
CAN(Controller Area Network)即控制器局域网络。由于其高性能、高可靠性、及独 特的设计,CAN越来越受到人们的重视。国外已有许多大公司的产品采用了这一技术。
CAN最初是由德国的BOSCH公司为汽车监测、控制系统而设计的。现代汽车越来越多地采用电子装置控制,如发动机的定时、注油控制,加速、刹车控制(ASC)及复杂的抗锁定刹车系统(ABS)等。由于这些控制需检测及交换大量数据,采用硬接信号线的方式不但烦琐、昂贵,而且难以解决问题,采用CAN总线上述问题便得到很好地解决。
CAN标准及原理图
CAN总线是一种用于在不同的ECU(电子控制单元)之间传输数据的线,CAN总线协议是一种ISO 国际标准化的串行通信协议,有 ISO-11898 和 ISO-11519两个系列。其定义有:
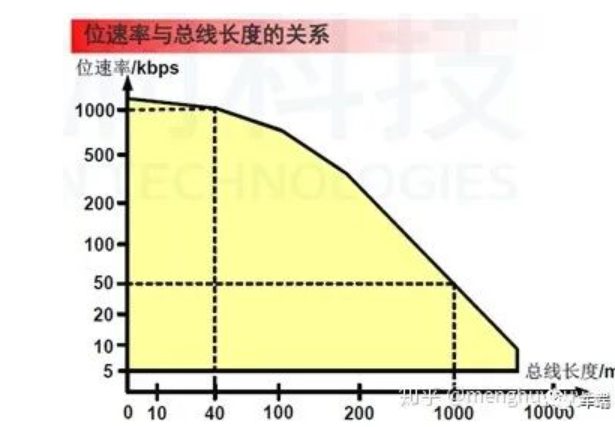
ISO-11898 定义了通信速率为 125 kbps ~1Mbps 的高速 CAN 通信标准,属于闭环总线,传输速率可达1Mbps,总线长度 ≤ 40米,如下图。
ISO11519 定义了通信速率为 10~125 kbps 的低速 CAN 通信标准,属于开环总线,传输速率为40kbps时,总线长度可达1000米,如下图。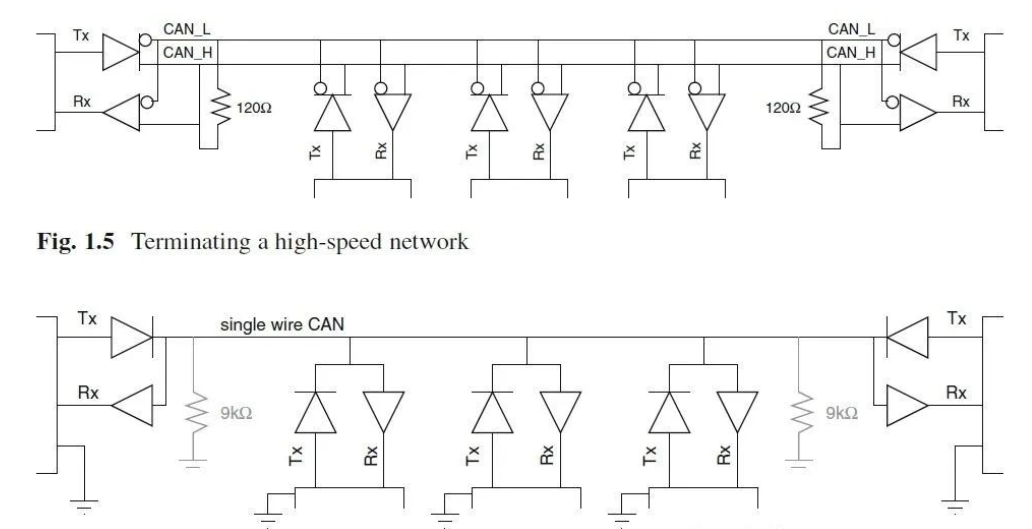
CAN特性
- 传输速率最高可达1Mbps,距离最远可达10km
- 通信介质选择灵活(双绞线、同轴电缆、光纤)
- 采用双线差分信号
- 协议本身对节点的数量没有限制
- 总线上节点的数量可以动态改变,组网灵活
- 短帧结构,传输时间短,受干扰概率低
- 多主站结构,各节点平等,任一节点可在任一时刻主动发送
- 非破坏性的基于优先级的总线仲裁
- 优先级通过报文的标识符(ID)区分,报文标识符在网络中是唯一的
- 标识符描述了数据的含义
- 某些特定的应用对标识符的分配进行了标准化
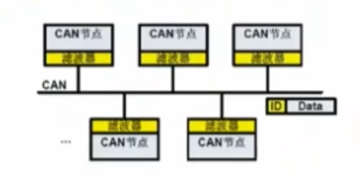
- 广播发送报文,报文可以被所有节点同时接收
- 根据需要可进行相关性报文过滤
CAN功能特性
CAN总线上,信号表现为电压形式,通过CAN_H和CAN_L线上的电位差来表示CAN信号,分为显性电平(dominant)和隐性电平(recessive)两种类型。其中显性电平规定为逻辑0,隐性电平则为逻辑1。其具体定义可通过下图来理解。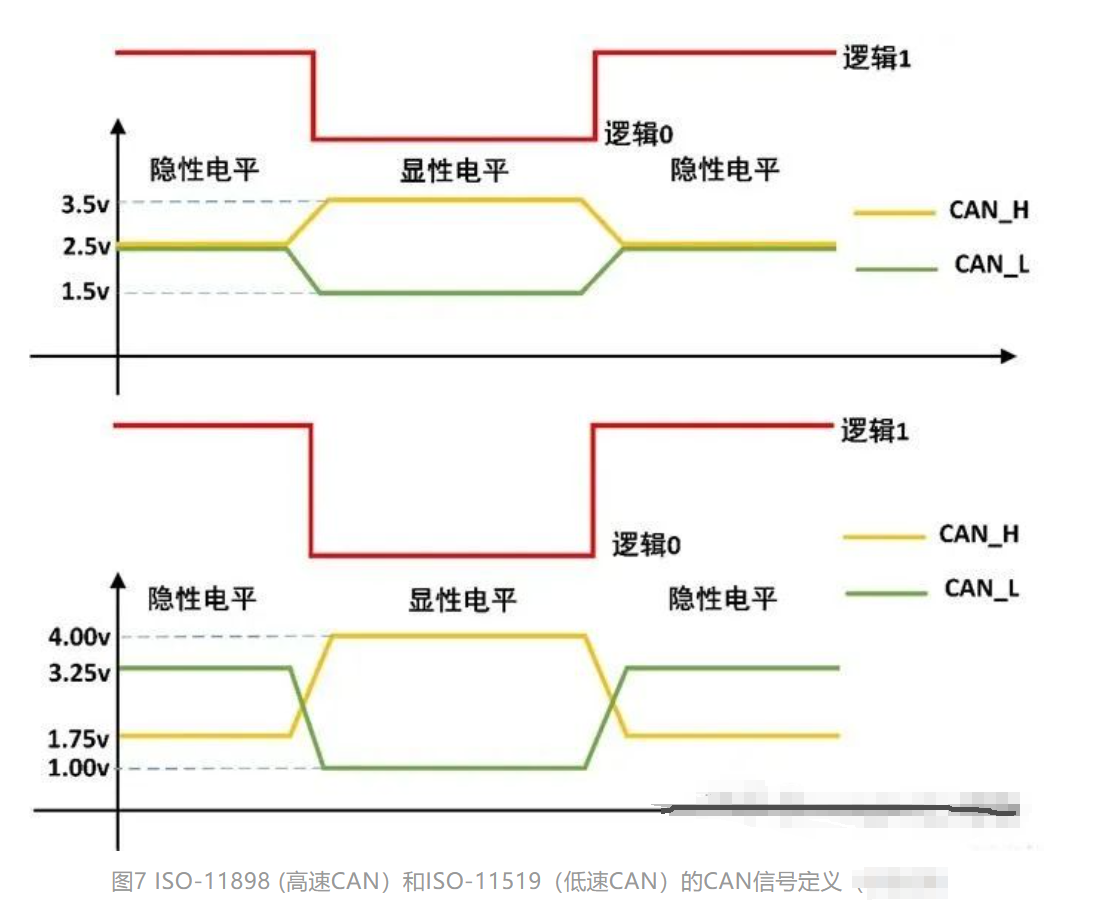
CAN系统构成
有两种,如下图;第三种是CAN收发器也集成到微控制器中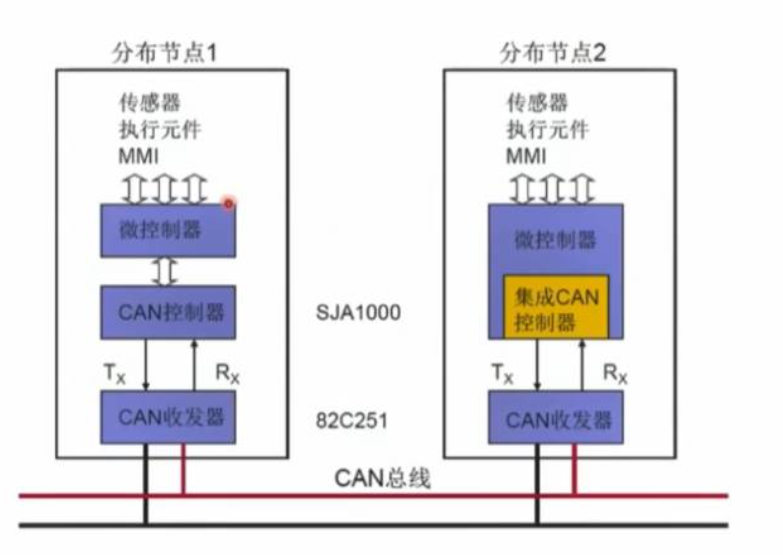
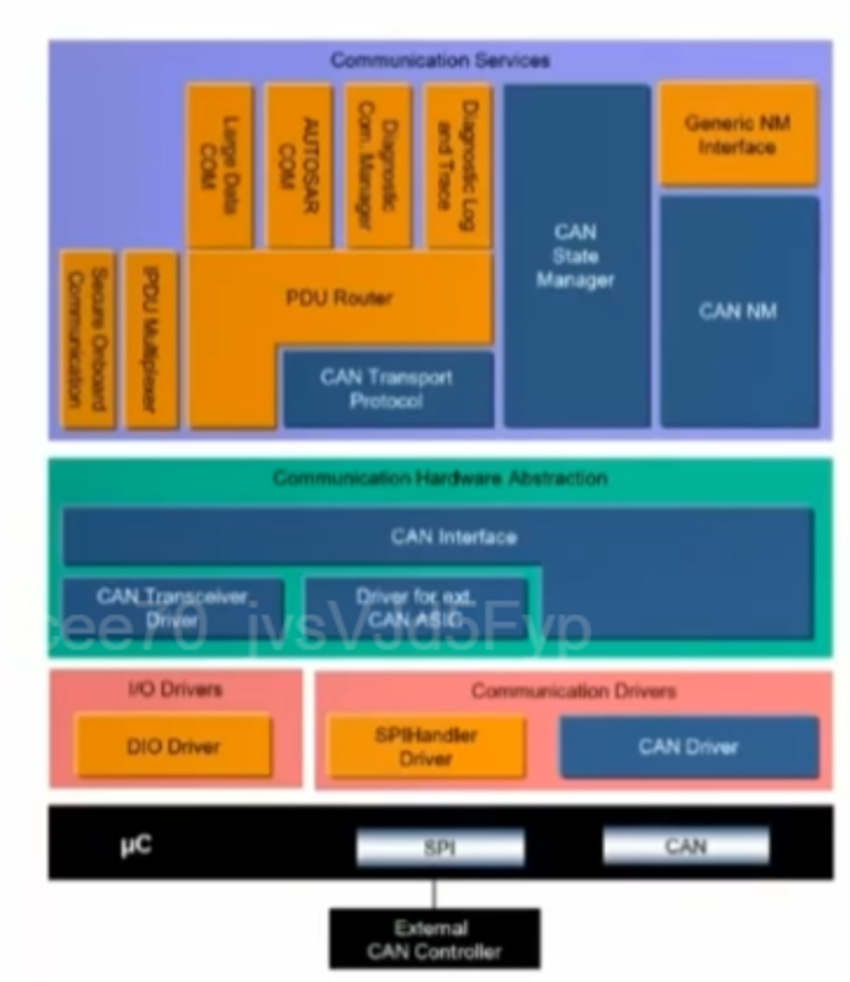
AUTOSAR CAN协议栈概述
- Driver:主要包括CAN的Driver,以及根据外部的CAN的收
- HaedwareAbs:包括用于区分CAN通信的接口,接收/发送不同功能的PDU以及控制CAN收发器进行工作的Transceiver
- Services:包换CAN的状态管理以及PDU和信号的处理相关的模块
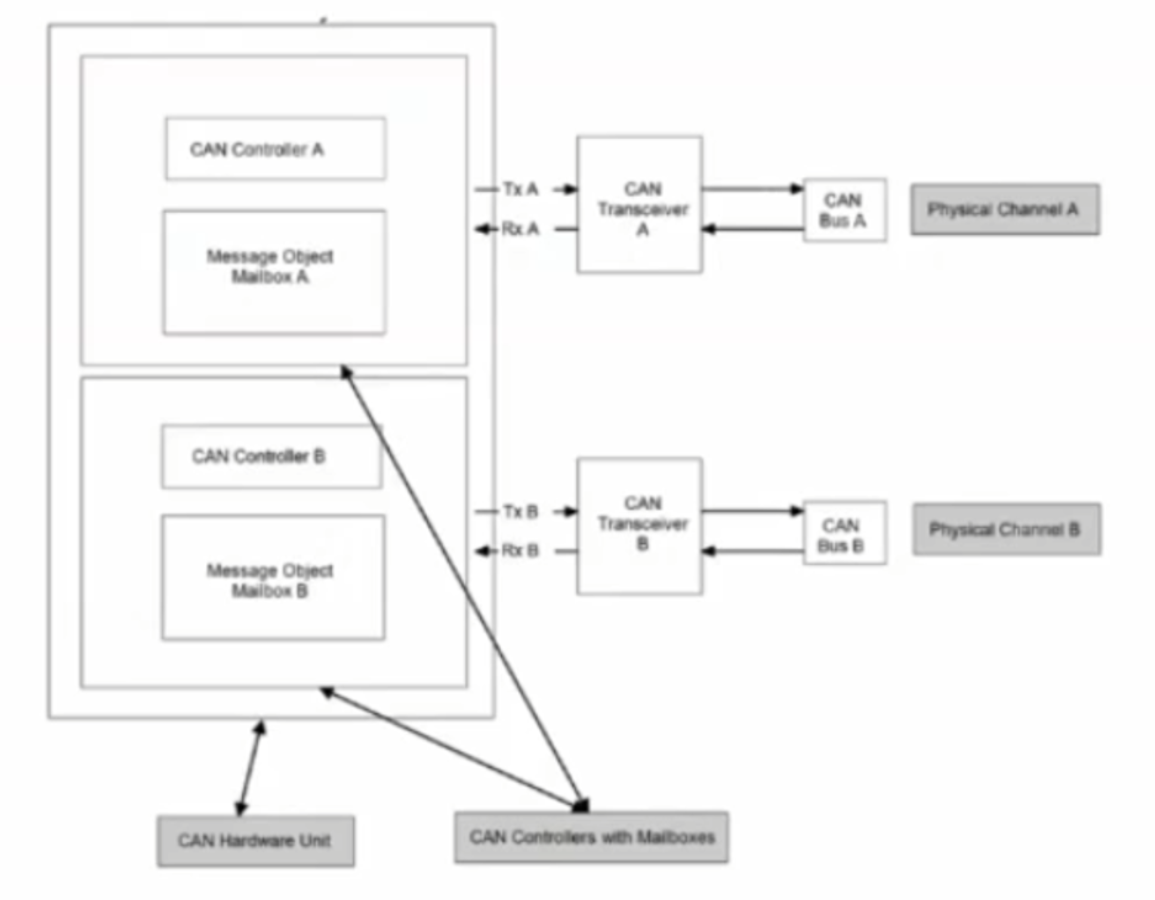
CAN Driver
- MCU的CAN外设控制模块
- 主要数处理CAN的控制器中的功能,实现 数据在MCU CAN模块的收发
MCAL相关配置
- CanGeneral:配置一些API的使能函数周期等
- CanController:配置MCU的CAN外设操作功能以及CAN的Filter
- CanHaradwareObject:配置CAN的接收发送邮箱以及使用的Filter
CANTrcv
CAN Trcv模块主要控制CAN外部收发器的模式,MCU的CAN信号与CAN总线建立起数据交互;目标是为适用于大多数当前和未来CAN收发器设备定义接口和行为。CAN Trcv抽象了CAN收发器硬件。它为更高层提供了一个独立于硬件的接口。 它通过使用MCAL层的API来访问CAN收发器硬件,以便实现ECU布局中的抽象化。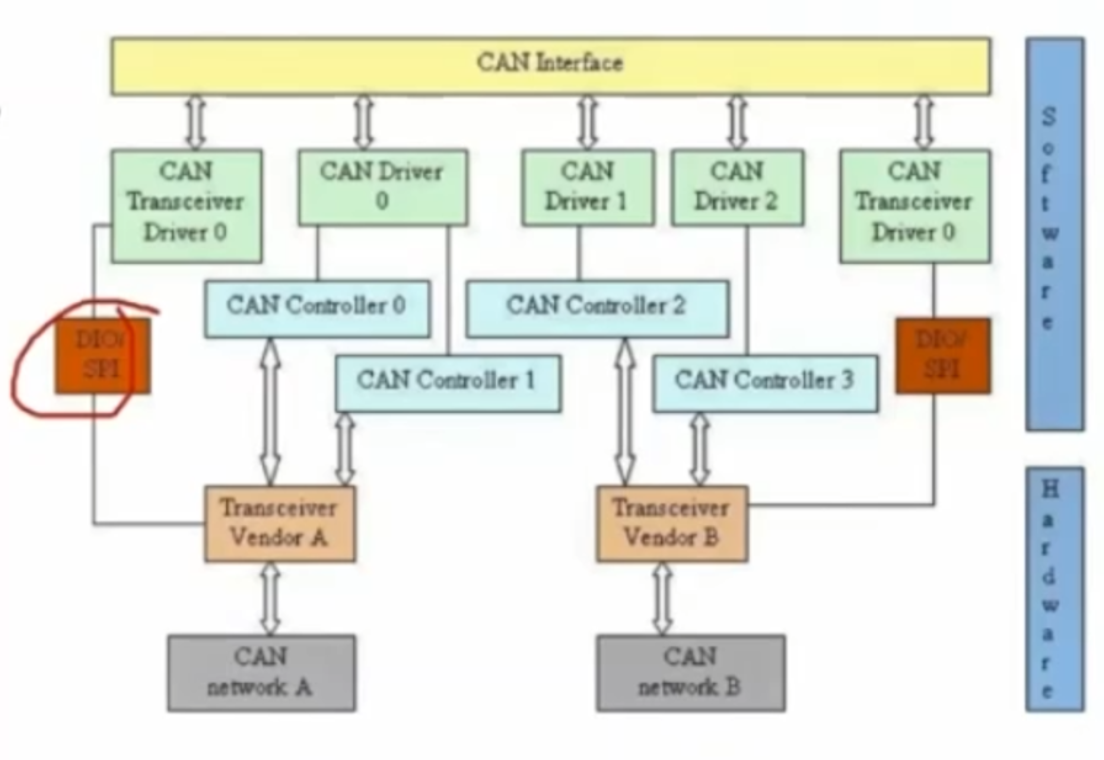
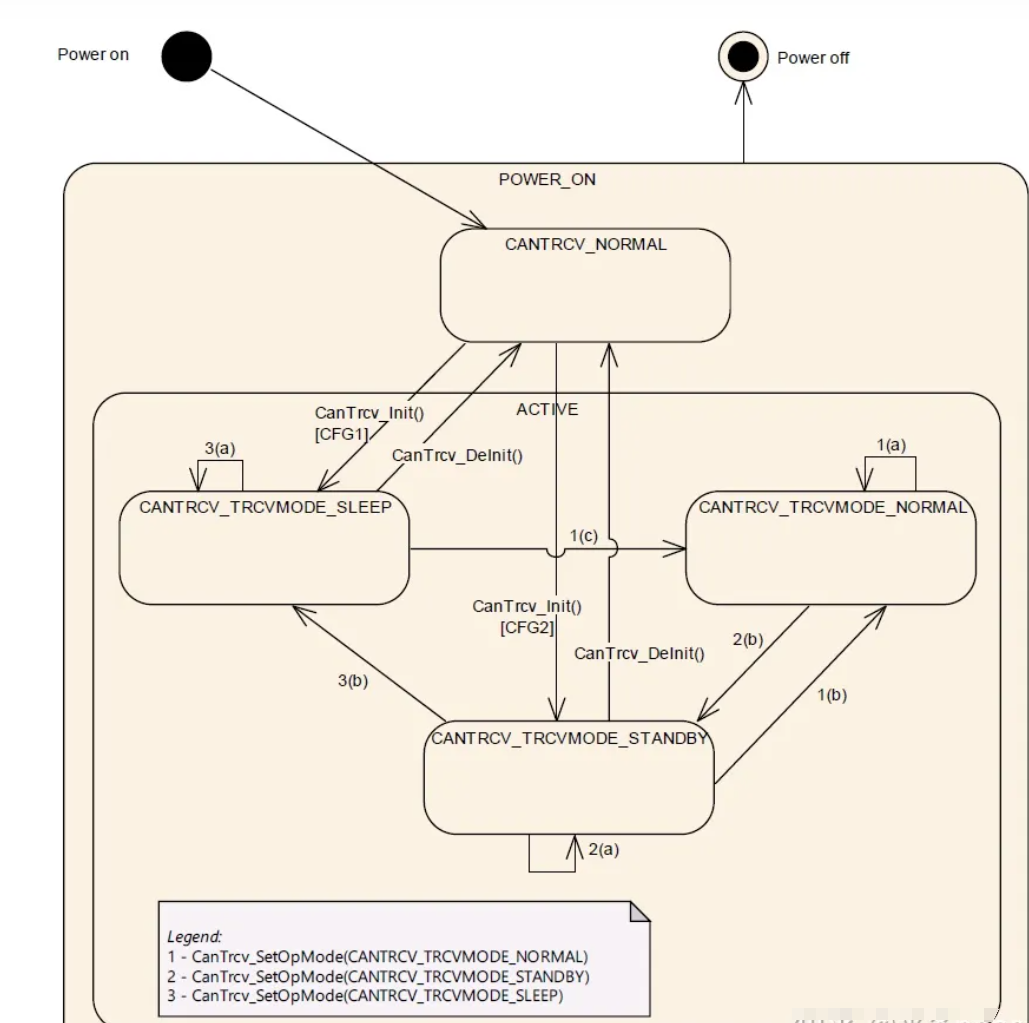
CANTrcv 模式切换
- CANTrcv的模式转换主要通过控制Dio或者SPI来控制硬件Trcv
- 上电调用Init可以直接切换到任意一个模式
- SetMode函数用于被MainFunction或者CANIf接口调用控制
- 在支持唤醒的Trcv一定要确保下电进入Sleep,才能有唤醒功能,这个时候Trcv处于常电模式,且唤醒中断引脚连接SBC的唤醒引脚
MCAL配置
·General:主要配置相关API的使能以及是否支持唤醒等功能
·ConfigSet:根据外部电路配置Trcv的通道,主要分为DIO控制的和SPI控制的,DIO控制的根据使用的PIN关联到DIO通道,SPI控制的要分配SPI的Sequence
AUTOSAR CAN协议栈集成
AUTOSAR CAN调试策略
参考链接
AUTOSAR_TR_FoundationReleaseOverview
AUTOSAR中国官方培训课程
提示
若本文对您有用,欢迎送个表情包或评论
;若有不对之处或建议,欢迎评论